




MANUFACTURING PROCESS CONTROL LABORATORY (MPCL) CONDUCTS RESEARCH ON MANUFACTURING PROCESSES, MACHINES AND THEIR AUTOMATION.
One of our main strength is development of NC (numerical control) systems for manufacturing equipment such as CNC machine tools or industrial automation systems. We develop precision motion control laws and smooth trajectory generation algorithms to realize high-speed high-accuracy motion. Our research effort is focused on complex coordinated motion generation in high performance CNC machine tools, and some other applications include wafer steppers, robots as well as precision measurement devices.
Another area of research interest is on the design, modeling and optimization of manufacturing processes. Emphasis is put on the metal cutting operations and optimization of various processes with respect to metrics such as chatter vibrations, surface quality and material removal rate.
If you are interested in machine tools, manufacturing and automation, and would like to share ideas or conduct research with us, we welcome you to contact us.
Director
Burak SENCER, Ph.D
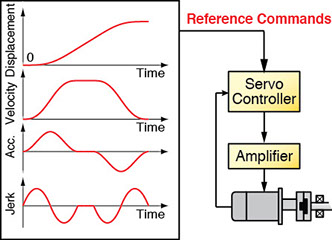
Trajectory (Reference Command) Generation play a key role in achieving desired accuracy and productivity on modern machine tools and motion systems. The objective of this research is to generate optimal trajectories for modern numerical control(NC) systems. See more...
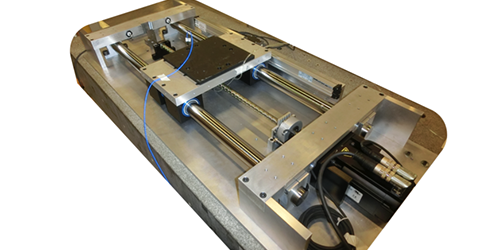
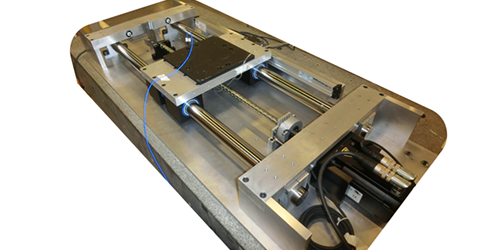
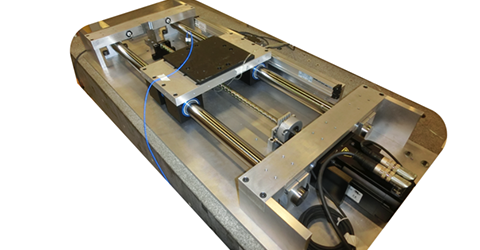
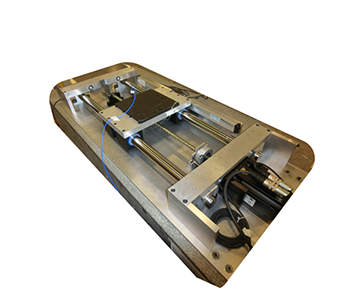
The objective of this research is to design advanced Motion Control algorithms and precision mechatronics for high performance feed delivery systems found in ultra-precision CNC Machines, litrography equipment and motion stages. See more...
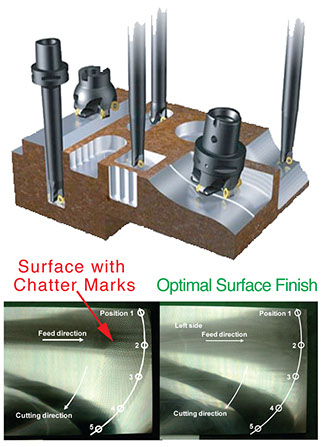
Machining processes are the backbone of today's automotive and aerospace industries. The objective of this research is to model and optimize metal cutting processes, and innovate novel high-performance machining techniques. See more...
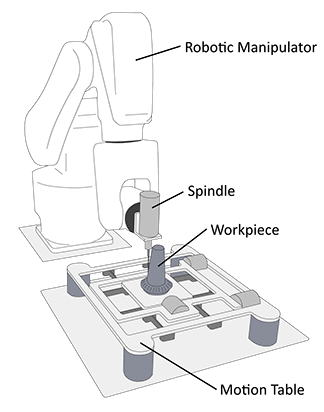
Deploying labor intensive post-processes such as deburring, polishing, etc on industrial robots can improve overall production efficiency and flexibility. This research tries to develop assistive devices and error compensation techniques for robotic processing.
