
Accurate Trajectory Generation for Motion Systems
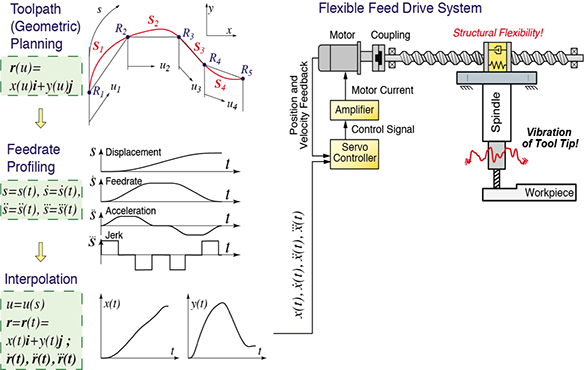
Reference trajectory generation plays a key role in computer numerical control (CNC) machine tools and various motion systems. Generated trajectories must not only describe the desired path accurately, but must also have smooth kinematic profiles in order to maintain high tracking accuracy, and avoid exciting natural vibration modes of the mechanical structure or the servo control system.
The aim of this research area is to design of computationally efficient trajectory generation techniques for 3 and 5-axis Machine Tools and Industrial Robots that can provide rapid and accurate feed motion.
Precision Motion Control of Flexible Structures
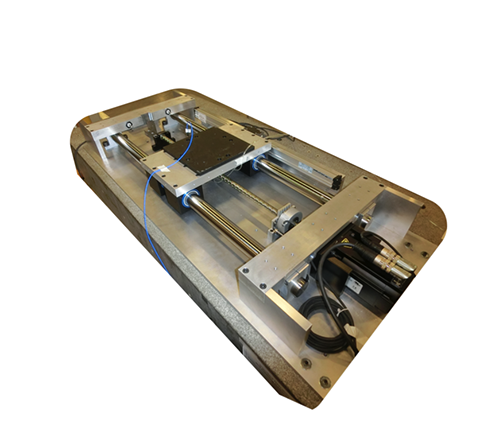
The dynamic accuracy of the manufacturing equipment is greatly affected by the performance of their servo controllers. Typically, the key limitation in achieving high band-width servo control is structural resonances such as the lightly damped modes in the feed drive system. This research aims to achieve high band-width servo control though active control of structural dynamics. New type of feedback control laws that make use of novel sensor fusion techniques are developed. Developed techniques allows are tested on in-house designed systems such as precision ball-screw motion stages.
Efficient Machining Processes Through Assistance
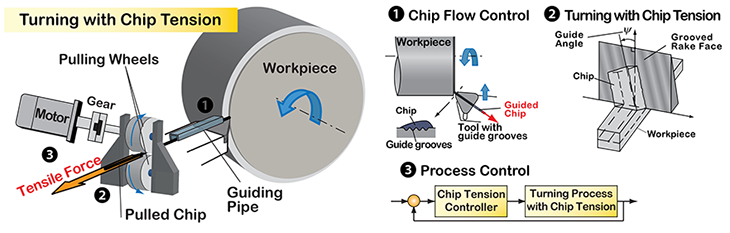
- Chip Pulling Turning -
Typically machining processes are not efficient. Cutting effort is directed towards shearing the material and overcoming the friction forces. Energy consumed for shearing generates continuous chip while energy is wasted on friction as the chip flows on the rake face. Notably, the friction force component can be as large as the shearing force itself. The objective of this research is to improve the efficiency of the metal cutting processes through external mechanical assistance. A chip-pulling turning process is proposed which pulls the cut chip with a tension to cancel the effect of friction.
Published Work
