
Trajectory generation plays a key role towards exploiting the full potential of motion systems. There are three key requirements from modern trajectory generators:
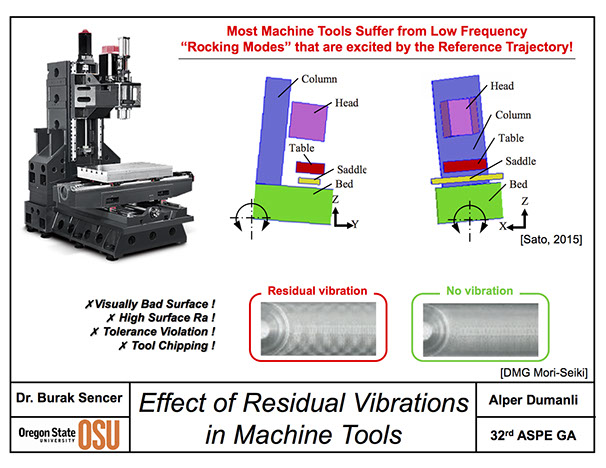
1- Time Optimality : Generated trajectories should deliver rapid motion to minimize the overall cycle time. This can be achieved by planning reference acceleration profiles that utilize the full kinematic limits of the machine. For instance, Bang-bang style acceleration/jerk profiles are typically utilized by most trajectory generators. These profiles are effective in minimizing overall duration of the motion. However, due to the frequency spectrum of aggressive reference commands, lightly damped structural modes of motion system could be excited. This causes large unwanted vibrations, and if not avoided, these types of vibrations can significantly deteriorate positioning accurately, jeopardize the production quality and even damage the equipment.
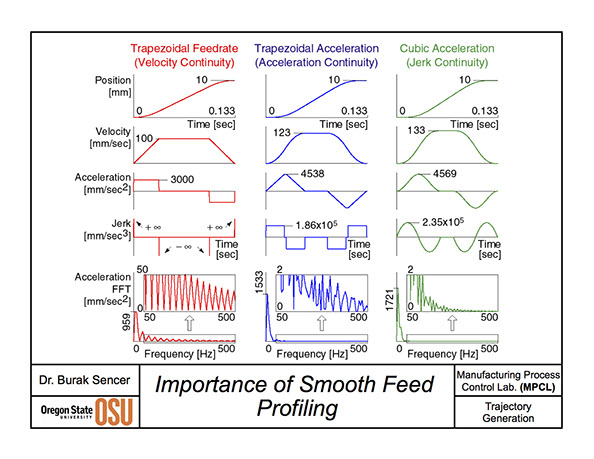
2- Frequency Spectrum: Next, frequency content of the reference trajectory is critical. Typically, modern machine tools structures suffer from several vibration modes ranging from low and high frequency. Therefore, reference trajectories must present desirable frequency spectra so that those lightly damped modes are not excited. Our research focuses on proposing novel techniques to generate trajectories with tuned frequency energy.
3- Finally, trajectory generation algorithms must be implemented in real-time. Therefore, developed methods must be computationally efficient to be implemented in real-time on modern processing systems. Our group is developing real-time programmable low cost trajectory generation techniques for modern machine tools and motion systems.
Published Work
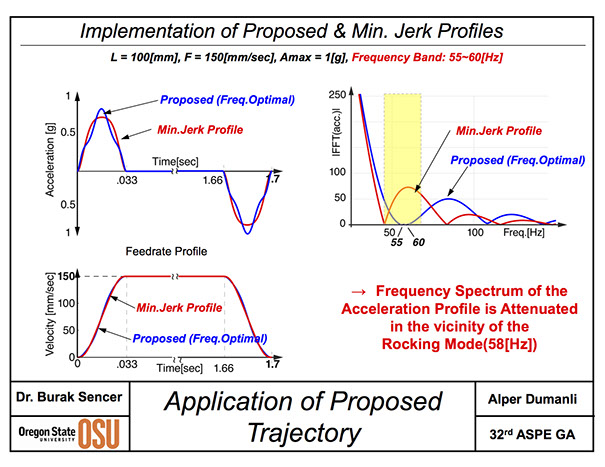
1) A novel polynomial based reference trajectory generation technique is developed, which allows designers to tune its frequency spectrum. The reference acceleration profile can be generated with a "notch-like" frequency spectrum to avoid exciting lightly damped structural modes of the motion system.
The algorithm can used in wafer scanning, 3D printing, laser patterning and other processes which require precision point-to-point motions
2) A computationally efficient real-time path interpolation technique is developed, which can generate smooth coordinated motion along discrete tool-paths. The contour error is controlled efficiently enabling real-time implementation, and vibration suppression is achieved through embedded Finite Impulse Response(FIR) filtering.
Future work is focused towards trajectory generation techniques for 5-axis machines and multi-axis robotic manipulators.
