PI: Michael J. Olsen
Co-PI: Christopher Parrish
Others: Erzhuo Che, Jaehoon Jung
Year: 2016-2018
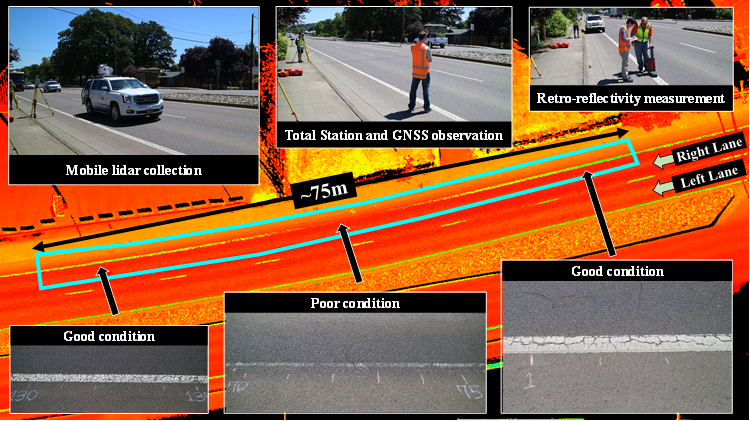
Pavement markings and signs are important traffic control device, used to guide and regulate traffic movement through visual information presented to motorists. Signs and markings are made with retroreflective materials to enhance visibility for motorists, particularly at night. Retroreflectivity evaluation of the extensive highway network for maintenance and asset management purposes is a critical, yet challenging task for Oregon DOT. Visual evaluation can often be subjective and inconsistent while field measurement techniques can be time-consuming and dangerous. This project investigated the effectiveness of evaluating pavement marking and sign retroreflectivity with mobile lidar data. Mobile lidar datasets (pointclouds) can be used to extract quantitative, accurate estimates of retroreflectivity for pavement markings, providing a safe, cost-effective, and reliable method of performing the required evaluation.
ODOT currently tracks several metrics for compliance of pavement markings, including appearance and retroreflectivity. The Maintenance Section of ODOT uses a van, which travels the state every summer, to capture retroreflectivity values on lane markings, which are analyzed and used in creating a plan of action for maintenance (e.g., vendor replacement if covered under warranty, or in house or contracted maintenance). Unfortunately, issues arise due to the timing and frequency of the data acquisition. Often, individual hand-held reflectometer readings are required after winter months to recheck compliance, which may be risky (roadside) and staff time intensive. Sign retroreflectivity evaluations suffer from similar limitations and are more cumbersome for crews to perform the retroreflectivity measurements.
To this end, SPR799 has the following research objectives:
Result of automatic pavement marking extraction: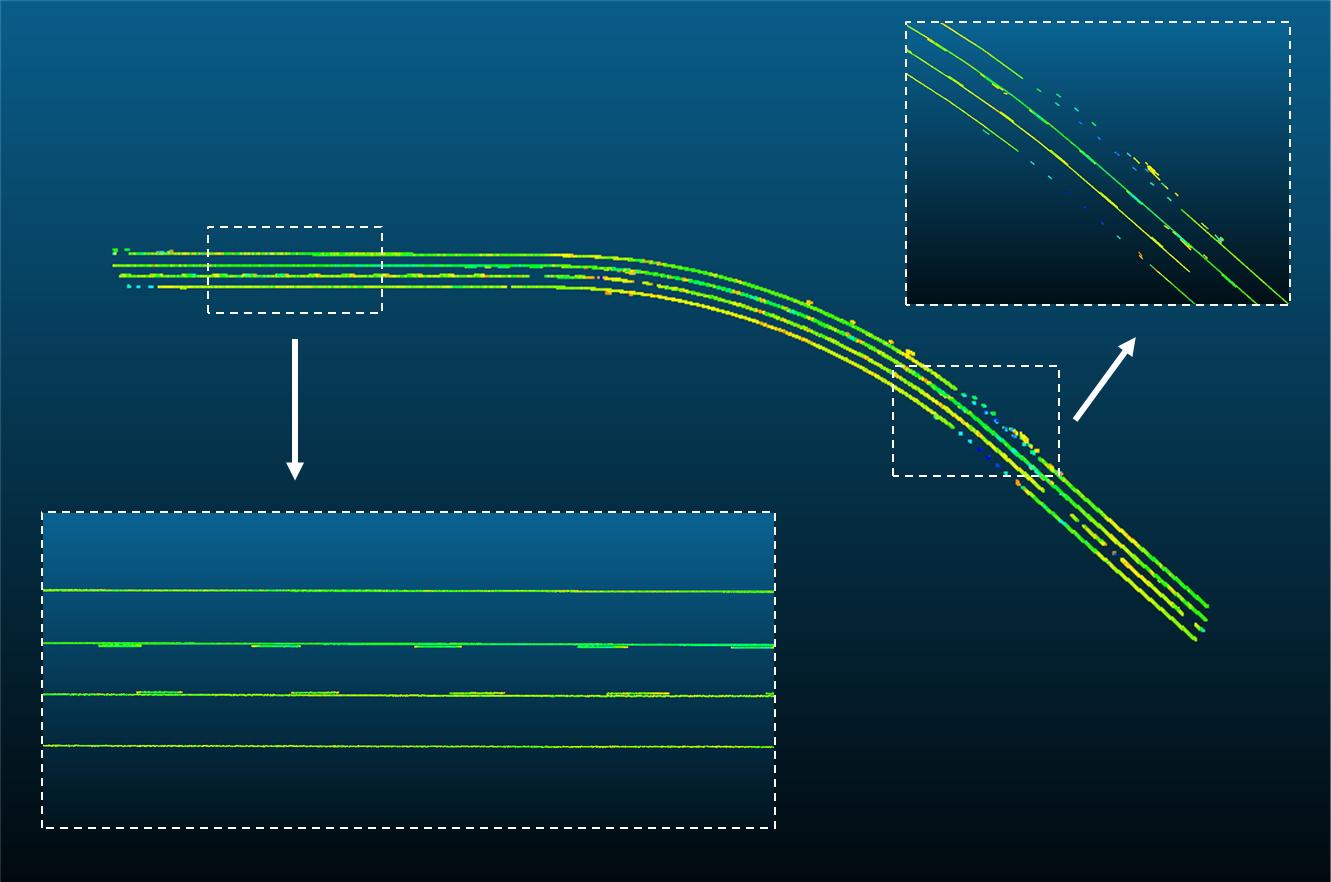
Correlation between intensity and retroreflectivity values: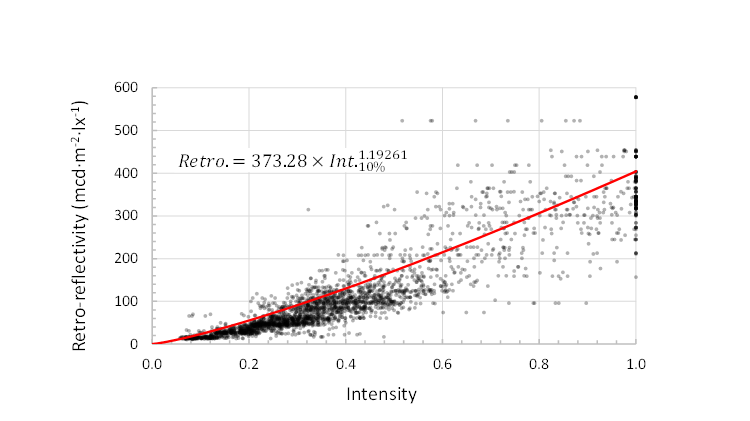
The pavement condition maps generated in ArcGIS using mobile lidar data: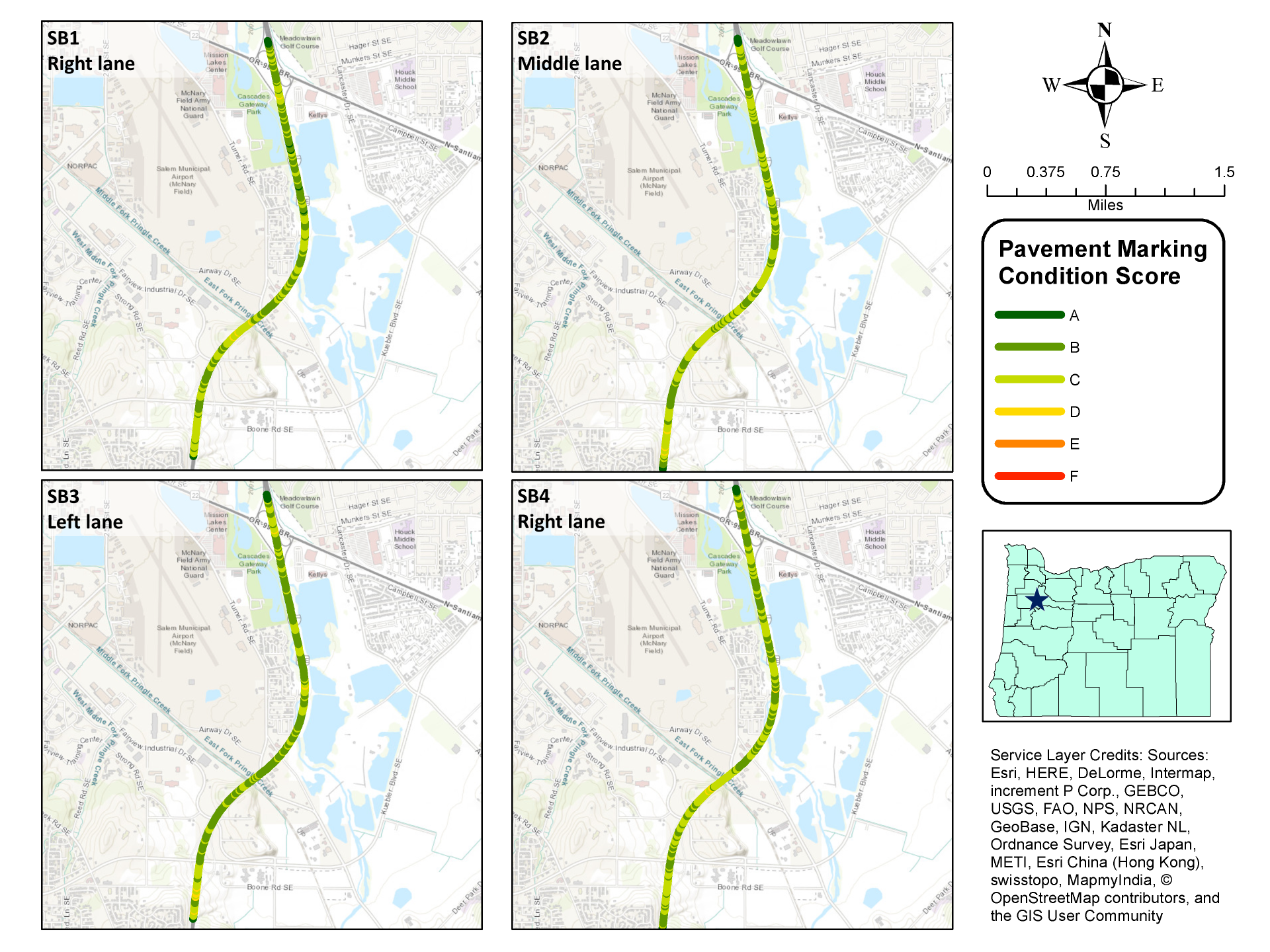
Reports:
Other Publications: