
Unmanned Aerial Vehicle Planning and Coordination
Graduate students in the RDML develop intelligent planning and coordination algorithms for UAVs gathering sensor data in obstacle-rich environments.

Autonomous Inland Waterway Navigation
Autonomous surface vehicles deployed in the coastal ocean and in our lakes and rivers help improve ecological sustainability.
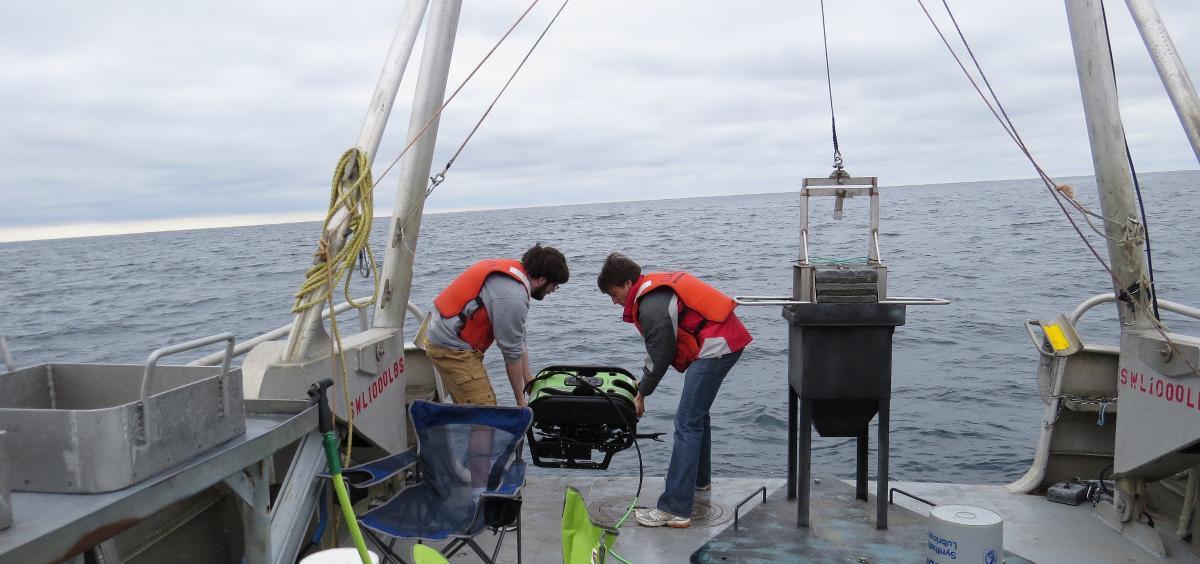
Offshore Inspection and Monitoring
Semi-autonomous underwater vehicles operating offshore provide cost-effective maintenance, monitoring, and inspection capabilities without endangering human divers.

Ubiquitous Sensing
Robotic sensing systems underwater and in the air can help us to understand the effects of urbanization on fragile inland and coastal waterways in Oregon and throughout the world.

Robotics Graduate Program
The Robotic Decision Making Laboratory designs algorithms and builds autonomous systems to gather scientific data in the physical world.